Nous vous permettons de bouger.
Linx


Linx
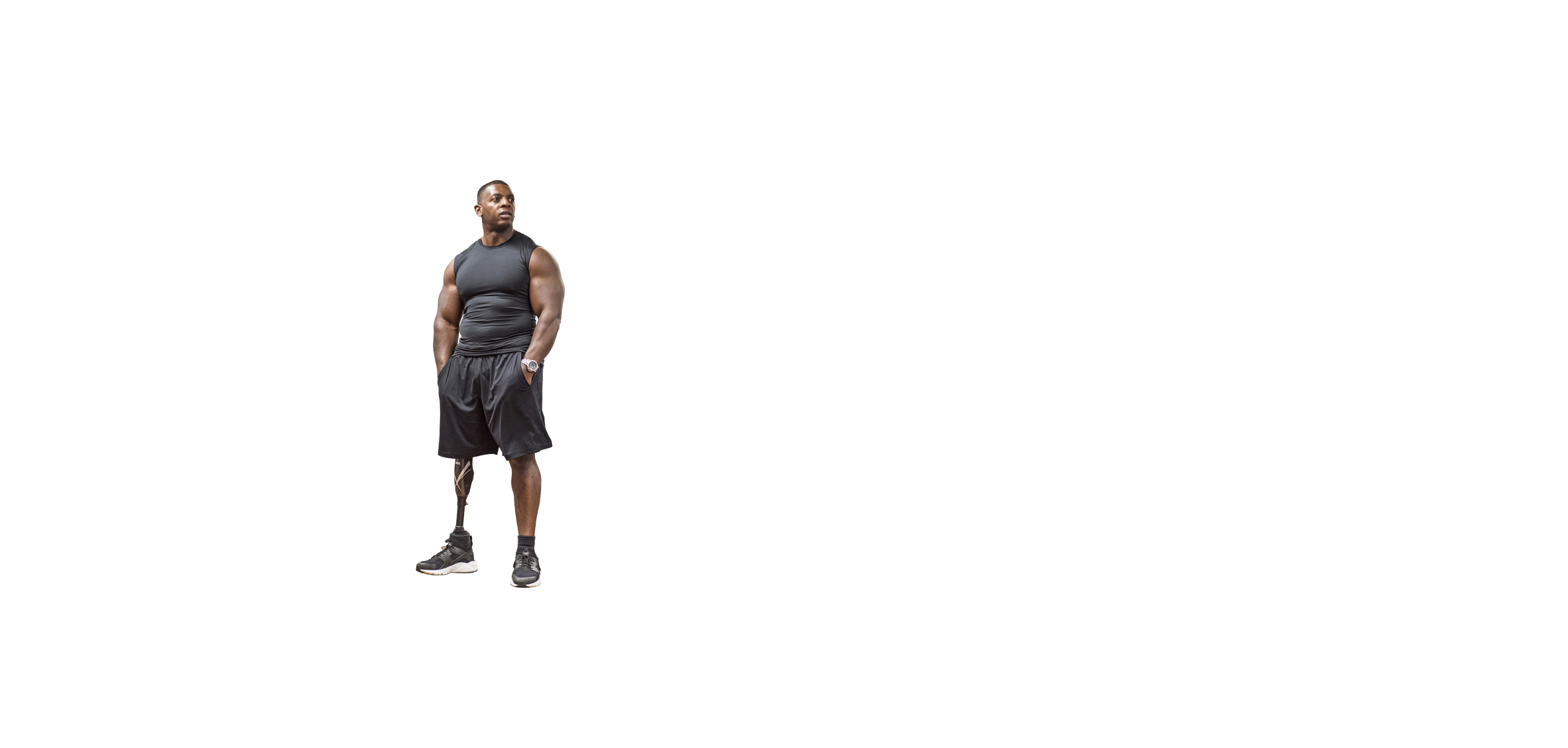
Le Linx est le seul dispositif de membre inférieur entièrement intégré existant au monde. Il a été récompensé à plusieurs reprises pour sa conception et son innovation.
Fonctionnant comme une seule unité, le Linx offre une expérience qui imite la structure incroyable et complexe de la jambe humaine en détectant et en analysant activement les données relatives aux mouvements de l’utilisateur, à son activité, à son environnement et au terrain, et en fournissant un flux coordonné d’instructions au système hydraulique de soutien.
Il en résulte une expérience de marche plus proche du naturel que jamais auparavant.

Caractéristiques
- Linx utilise un contrôleur principal pour les deux articulations. Dans le membre, quatre microprocesseurs et sept capteurs situationnels ajustent et stabilisent le système en fonction des terrains, de l’inclinaison des plans inclinés et de la vitesse de marche
- Équilibre dynamique – Linx s’auto-aligne en statique et en dynamique afin de promouvoir une sécurité posturale, quel que soit le terrain.
- Mode blocage en flexion, genou fléchi ou sur plans inclinés – répartition confortable et sûre du poids
- Mode dynamique en plan incliné – Résistance en dorsiflexion accrue pour descente mieux maîtrisée et plus sûre
- Motion Integrated Intelligence ou Intelligence intégrée des mouvements = Mi² – Réponse synchronisée aux informations des capteurs pour plus de cohérence en dynamique
- AMÉLIORATION! Mode d’aide à la montée sur plans inclinés
- NOUVEAU! Amortissement de l’élévation du talon
- AMÉLIORATION! Reconnaissance de descente d’escaliers
- AMÉLIORATION! Résistance accrue lors de la décélération
- NOUVEAU! Mode Entraînement
- NOUVEAU! Point de recharge encastré, couvert et magnétique
- NOUVEAU! Application de programmation pour Android et iOS
- NOUVEAU! Fonction de programmation par boutons
- Activity level 3
- Suitable for outdoor use
- Microprocessor control
- Bluetooth connectivity
Le membre complètement connecté
-
Communication continue
Une seule unité de commande centrale vous permet d’être connecté et de garder le contrôle. Associée à des capteurs et à des points de collecte de données, cette unité centrale permet au genou et à la cheville de fonctionner comme un seul membre complet, comme la nature l’a voulu.
-
Sentir pendant que vous marchez
Les capteurs de mouvement et de charge capturent en permanence des données sur l’activité, l’environnement et le terrain ; le système recombine ces données pour anticiper les actions et adapter la réponse appropriée lors des déplacements de l’utilisateur.
-
Prêt pour votre prochaine étape
L’ensemble des capteurs fournit un flux continu de données dans la commande principale qui coordonne les réponses du dispositif. Cette réponse subtile vous donne la bonne quantité de contrôle des mouvements et de la posture afin que vous puissiez vous déplacer en toute confiance.
Performances de précision
Des capteurs intégrés analysent en permanence les données, ajustant la réponse à la technologie hydraulique pour le pas suivant. Cette réponse intégrée et coordonnée assure des temps d’ajustement rapides et une évolution dans les pentes et les escaliers, permettant à l’utilisateur de penser à l’endroit où il va, plutôt qu’à la façon dont il va y arriver.
-
Descente

Linx offre une descente de rampe contrôlée avec différents niveaux de réponse pour les pentes raides et peu profondes. Le genou et le pied travaillent ensemble pour optimiser la vitesse de flexion plantaire et dorsale. La résistance du genou est simultanément adaptée par l’introduction d’une résistance intermédiaire. Sur les rampes intermédiaires, Linx offre un effet de freinage qui sécurise l’ensemble du dispositif pour une descente en toute sécurité
-
Montée

Le genou et le pied travaillent ensemble, le pied se positionnant en dorsiflexion. La pointe de pied relevée facilite le passage du pas, tandis que le talon se raidit pour soutenir la flexion du genou. Si le patient est immobile en montée, le pied restera en flexion dorsale pour aider à réduire le moment d’extension sur le genou, permettant une posture plus droite pour une position debout plus confortable.
-
Vitesse et terrain

Grâce à la programmation simultanée du genou et du pied, combinées à l’Intelligence Artificielle et au système hydraulique, permettent des transitions plus fluides entre les vitesses de marche et une marche sur des terrains variés.
Confort
Les personnes amputées peuvent être confrontées à des problèmes de santé longtemps après l’amputation, les personnes amputées des membres inférieurs étant 2 à 3 fois plus susceptibles de développer de l’arthrose que la population générale. 1
La santé musculo-squelettique à long terme dépend de la reproduction des qualités dynamiques et adaptatives du mouvement naturel des membres, et Linx est la première prothèse de membre inférieur au monde à intégrer un système de réponse entièrement intégré pour répondre à ce besoin de l’utilisateur.
Sécurité
Les différents niveaux de soutien à la position fournis par Linx contribuent à augmenter la confiance et l’indépendance de l’utilisateur, réduisant ainsi le risque de trébuchements ou de chutes pour assurer une charge plus équilibrée des membres et une meilleure santé et protection à long terme. Linx offre un soutien optimal de la position, que vous marchiez dans un environnement encombré, sur un terrain accidenté, des pentes, des marches ou en position debout. Cette combinaison unique de l’aide à la position intégrée et de la technologie hydraulique de Linx contribue à la sécurité de l’utilisateur.
-
Phase d’appui contrôlée

La résistance tout au long de la phase d’appui offre une stabilité optimale pour la marche avec une plus grande sécurité et moins d’effort sur une variété de surfaces.
-
Station debout

La résistance maximale stabilise le genou et le pied sur les terrains plats et en pente, encourageant une meilleure posture et une charge équilibrée pour soulager la pression sur le membre sain et le bas du dos.
-
Récupération en cas de trébuchement

La résistance de phase d’appui s’enclenche pendant l’extension du bas de jambe pour assurer la stabilité du genou, si l’utilisateur trébuche. Dans de telles circonstances, la résistance à la flexion augmente dynamiquement pour améliorer la récupération en cas de trébuchement.
-
Descente dynamique des escaliers

Avec un soutien immédiat dès la première marche, la résistance du genou augmente progressivement avec la flexion du genou pour un contrôle et une sécurité accrus lors de la descente des escaliers.
-
Descente dynamique de la pente

La réponse simultanée du genou et du pied permet à l’utilisateur de marcher à pas alternés sur des pentes intermédiaires.
Partage d’expérience
Application de programmation intelligente

Mise à jour des Application Orion3 et Linx (application Android uniquement)
La mise à jour des applications Orion3 & Linx est maintenant disponible sur Play Store. Si vous avez téléchargé l'application en dehors du Google Play Store, vous devrez désinstaller puis réinstaller l'application depuis Play Store. Vous devrez également vous réautoriser en tant qu'utilisateur. L'application vous mènera à la page correspondante. Veuillez alors contacter votre représentant commercial de votre région pour obtenir le code d'autorisation.
L’application est disponible pour les prothésistes qui ont obtenu une certification reconnue par Blatchford. Vous aurez besoin d’un code d’autorisation.
Procédez comme suit:
- Rechercher et télécharger l’application Linx sur l’App Store Si vous utilisez un iPad, veuillez sélectionner « iPhone only ».
- La première fois que vous utilisez l’application, envoyez le code d’autorisation à huit chiffres à votre contact Blatchford.
- Entrez le code à 12 caractères fourni par votre contact Blatchford dans l’application
- Commencez la programmation d’Linx !
Si vous avez des questions, veuillez contacter le support technique de Blatchford :
Dominique. : [email protected]
* Compatible avec tous les modèles d’iPad, iPhone et iPod Touch avec iOS v9 ou plus récent
Linx Clinical Evidence Reference
Amélioration des résultats cliniques en utilisant Linx par rapport aux genoux mécaniques
-
Sécurité
- Réduction significative du nombre de chutes1,2
- Réduction des fluctuations du centre de pression de 9 à 11 % avec un support debout actif lorsque vous vous tenez debout sur un sol en pente3
- Moins d’exigence cognitive pendant la marche, ce qui entraîne une réduction du balancement postural4
-
Mobilité
- Augmentation de la vitesse de marche5
- Plus facile de marcher à différentes vitesses6
- Des scores plus élevés dans les mesures de résultats rapportées par les patients liés à la mobilité7
- Démarche plus naturelle6,8
- Plus facile à marcher sur les pistes6
-
Dépense énergétique
- Réduction de la dépense énergétique par rapport aux genoux mécaniques9-13
- Dépense énergétique équivalente à celle des autres MPK14
- Réduction de l’effort auto-perçu6,8
- Une dépense énergétique plus proche de celle des sujets témoins valides15
- Capable de marcher plus loin avant d’être fatigué6
-
Symétrie
- Meilleure symétrie de longueur de pas5
- Réduction de l’asymétrie de chargement grâce à l’appui debout actif sur un sol en pente3
-
Satisfaction des utilisateurs
- Réduction de la peur de tomber1
- Réduction des limitations dues à un problème émotionnel8
- Préférence par rapport à d’autres genoux prothétiques1,6
- Une plus grande confiance prothétique dans la descente de pente et la terminaison de la marche16
-
Économie de la santé
- Réduction des coûts directs et indirects des soins de santé lors de l’utilisation d’un MPK17
Amélioration des résultats cliniques à l’aide de Linx par rapport aux pieds VS
-
Sécurité
Réduction du risque de trébuchement et de chute
- Augmentation du dégagement minimum des orteils pendant la phase d’élan18,19
Amélioration de la stabilité du genou du côté prothétique lors de la descente de pente
- Augmentation du moment d’extenseur externe du genou de la prothèse à mi-position20
Améliorer l’équilibre debout sur une pente
- Réduction de 24 à 25 % du carré moyen de la racine du centre de pression entre les membres (COP RMS)3
-
Dépense énergétique
Réduction de la dépense énergétique lors de la marche
- Réduction moyenne de 11,8 % de la consommation d’énergie sur un terrain plat, toutes vitesses de marcheconfondues 21
- Réduction moyenne de 20,2 % de la consommation d’énergie sur les pentes, toutes pentesconfondues 21
- Vitesse de marche moyenne 8,3 % plus rapide pour le même effort21
-
Mobilité
J’aiamélioré les performances de la marche
- Vitesse de marche auto-sélectionnée plus rapide18,22-25
Amélioration de la souplesse au sol lors de la marche sur les pentes
- Augmentation du pic de flexion plantaire lors de la marche en palier, de la marche rapide en palier et de la marche cambrée26
- Augmentation du pic de dorsiflexion pendant la marche en palier, la marche rapide en palier et la marche cambrée26
Moins de « point mort » prothétique pendant la marche
- Réduction du déplacement global négatif COP23
- Le centre de pression passe en avant de la tige de manière statistiquement significative plus tôt dans la position23
- Augmentation de la vitesse COM instantanée minimale pendant la phase d’appui unique d’un membre prothétique23
- Réduction de la vitesse de crête négative du COP25
- Réduction de la distance de déplacement postérieure du COP25
Amélioration de la souplesse au sol lors de la marche sur les pentes
- Augmentation de l’amplitude de flexion plantaire lors de la descentede pente 19
- Augmentation de l’amplitude de la dorsiflexion lors de l’ascension de la pente19
Moins d’effort sur la hanche résiduelle pour les amputés trans-fémoraux sur des terrains variés
- Réduction des moments moyens d’extension et de flexion de la hanche27
Des effets constants dans le temps
- Mêmes changements variables de la marche lors de deux séances de laboratoire de marche à un an d’intervalle22
- Ampleur des changements comparables entre les sessions22
Mode de freinage pendant la descente de la pente pour contrôler l’accumulation d’élan
- Réduction de la vitesse angulaire moyenne de la tige prothétique dans un seul support28
- Augmentation du segment déformable unifié (prothèse de cheville)travail négatif 28
Moins de mouvements de compensation de la marche lors de la descente de pente
- Réduction de la flexion résiduelle du genou à la réponse de charge28
-
Santé des membres résiduels
Aide à protéger les tissus résiduels vulnérables, réduisant ainsi les risques de dommages
- Réduction des contraintes maximales sur le moignon29
- Réduction de la contrainte RMS sur le moignon29
- Réduction des taux de charge sur le moignon29
-
Symétrie de chargement
Une plus grande contribution du membre prothétique au soutien pendant la marche
- Augmentation du moment d’extension du pic résidueldu genou 22
- Diminution du moment de flexion maximal résidueldu genou 22
- Augmentation du travail négatif résidueldu genou 24
Réduction de la dépendance à l’égard d’un membre sain pour le soutien pendant la marche
- Réduction du moment de flexion maximale de la hanche du membre intact24
- Réduction du moment de dorsiflexion du pic du membre intact24
- Réduction du travail négatif de la cheville intacte et du travail total24
- Réduction du travail articulaire total des membres intacts24
Meilleure symétrie de la charge entre les membres prothétiques et sains lors de la position debout sur une pente
- Degré d’asymétrie plus proche de zéro pour les amputés 5/520
Réduction des moments résiduels et des joints sains lors de la mise en place d’une pente
- Réduction significative des moments d’assistance prothétique et sonore30
Réduction des moments articulaires résiduels lors de la mise en place d’une pente pour les amputés bilatéraux
- Réduction significative du moment d’appui prothétique30
- Position « naturelle » du vecteur de réaction au sol autorisée dans le plan sagittal, par rapport aux centres de l’articulation du genou30
Moins de pression sur la plante du pied controlatéral
- Pression plantaire maximale31
Amélioration de la symétrie de la marche
- Réduction de l’asymétrie de synchronisation des phasesd’appui 32
-
Satisfaction des utilisateurs
Les mesures des résultats rapportés par les patients indiquent des améliorations
- Amélioration moyenne dans tous les domaines du questionnaire d’évaluation des prothèses33
- Les patients bilatéraux ont montré la plus forte amélioration moyenne de la satisfaction33
Préférence subjective de l’utilisateur pour la cheville hydraulique
- 13/13 participants ont préféré cheville hydraulique31
Amélioration des résultats cliniques à l’aide de Linx par rapport aux chevilles hydrauliques non contrôlées par microprocesseur
-
Sécurité
Amélioration de la stabilité du genou du côté prothétique lors de la descente de pente
- Augmentation du moment d’extenseur externe du genou de la prothèse à mi-position19
-
Mobilité
Amélioration de la souplesse du sol lors de la descente des pentes
- Réduction du temps nécessaire pour mettre les pieds à plat28
Le mode de freinage pendant la descente de pente augmente la résistance à la dorsiflexion pour contrôler l’accumulation d’élan
- Réduction de l’amplitude de la dorsiflexion lors de la descente de la pente19
- Réduction de la vitesse angulaire moyenne de la tige prothétique dans un seul support28
- Augmentation du segment déformable unifié (prothèse de cheville)travail négatif 28
- La transition de la dorsiflexion au moment de flexion plantaire se produit plus tôt dans la phased’appui 34
- Augmentation du moment de flexion plantaire prothétique moyen de la cheville intégrale34
Le mode d’assistance pendant l’ascension de la pente diminue la résistance à la dorsiflexion pour permettre une progression plus facile
- La transition de la dorsiflexion au moment de flexion plantaire se produit plus tard dans la phased’appui 34
- Diminution du moment de flexion plantaire prothétique prothétique de la cheville intégrale34
Moins de mouvements de compensation de la marche lors de la descente de pente
- Réduction de la flexion résiduelle du genou à la réponse de charge28
-
Symétrie de chargement
Une plus grande dépendance à l’égard du côté prothétique pour le soutien du poids corporel pendant la descente de pente
- Augmentation du moment d’appui intégral34
Moins de dépendance à l’égard du côté sonore pour le soutien du poids corporel pendant la descente de pente
- Diminution du moment d’appui intégrale34
Moins de dépendance à l’égard du côté sonore pour le soutien du poids corporel pendant l’ascension de la pente
- Diminution du moment d’appui intégrale34
Réduction des moments d’articulation acoustique lors de la mise en place d’une pente
- Réduction significative du moment d’assistance sonore30
Réduction des moments articulaires résiduels lors de la mise en place d’une pente pour les amputés bilatéraux
- Réduction significative du moment d’appui prothétique30
- Position « naturelle » du vecteur de réaction au sol autorisée dans le plan sagittal, par rapport aux centres de l’articulation du genou30
-
Satisfaction des utilisateurs
- Une plus grande confiance prothétique dans la descente de pente et la terminaison de la marche16
Références
-
Liste complète des références
-
Kaufman KR, Bernhardt KA, Symms K.
Évaluation fonctionnelle et satisfaction des amputés transfémoraux à faible mobilité (FASTK2) : Un essai clinique sur les genoux contrôlés par microprocesseur par rapport aux genoux non contrôlés par microprocesseur. Clin Biomech 2018 ; 58: 116–122.
-
Campbell JH, Stevens PM, Wurdeman SR.
OASIS 1 : Analyse rétrospective de quatre types de genoux à microprocesseur différents. Journal de l’ingénierie de la réadaptation et des technologies d’assistance. Novembre 2020 ;7 :2055668320968476.
-
McGrath M, Laszczak P, Zahedi S, et al.
Les genoux à microprocesseur avec « support debout » et chevilles hydrauliques articulées améliorent le contrôle de l’équilibre et la charge entre les membres lorsque vous êtes debout dans le calme. J Rehabil Assist Technol Eng 2018 ; 5: 2055668318795396.
-
Heller BW, Datta D, Howitt J.
Une étude pilote comparant l’exigence cognitive de la marche pour les amputés transfémoraux utilisant la prothèse intelligente à celle utilisant des genoux amortis conventionnellement. Clin Rehabil 2000 ; 14: 518–522.
-
Chin T, Maeda Y, Sawamura S, et al.
Pose prothétique réussie de personnes âgées amputées transfémorales avec une prothèse intelligente (IP) : une étude pilote clinique. Prosthet Orthot Int 2007 ; 31: 271–276.
-
Datta D, Howitt J.
Contrôle de phase d’oscillation pneumatique conventionnel ou contrôlé par micropuce pour les amputés transfémoraux : verdict de l’utilisateur. Prosthet Orthot Int 1998 ; 22: 129–135.
-
Wurdeman SR, Stevens PM, Campbell JH.
Analyse de la mobilité des personnes amputées (MAAT 3) : L’appariement des personnes en fonction de leur état de santé comorbide révèle une amélioration de la fonction des utilisateurs de prothèses au-dessus du genou grâce à la technologie du genou à microprocesseur. Assist Technol 2018 ; 1–7.
-
Saglam Y, Gulenc B, Birisik F, et al.
L’analyse de la qualité de vie des prothèses de genou avec contrôle complet par microprocesseur chez les amputés trans-fémoraux. Acta Orthop Traumatol Turc 2017 ; 51 : 466e469.
-
Chin T, Sawamura S, Shiba R, et al.
Dépense énergétique lors de la marche chez les personnes amputées après une désarticulation de la hanche : un genou de contrôle de phase d’oscillation contrôlé par microprocesseur par rapport à un genou de contrôle de phase de position contrôlé mécaniquement. J Bone Joint Surg Br 2005 ; 87: 117–119.
-
Datta D, Heller B, Howitt J.
Une évaluation comparative de la consommation d’oxygène et du modèle de marche chez les amputés à l’aide de prothèses intelligentes et d’un contrôle conventionnel de la phase d’oscillation du genou. Clin Rehabil, 2005 ; 19: 398–403.
-
Buckley JG, Spence WD, Solomonidis SE.
Coût énergétique de la marche : comparaison de la « prothèse intelligente » avec le mécanisme conventionnel. Arch Phys Med Rehabil 1997 ; 78: 330–333.
-
Taylor MB, Clark E, Offord EA, et al.
Une comparaison de la dépense énergétique d’un amputé transfémoral de haut niveau utilisant la prothèse intelligente et des membres prothétiques amortis conventionnellement. Prosthet Orthot Int 1996 ; 20: 116–121.
-
Kirker S, Keymer S, Talbot J, et al.
Une évaluation de la prothèse de genou intelligente. Clin Rehabil, 1996 ; 10: 267–273.
-
Chin T, Machida K, Sawamura S, et al.
Comparaison de différentes articulations du genou contrôlées par microprocesseur sur la consommation d’énergie lors de la marche chez les amputés trans-fémoraux : prothèse de genou intelligente (IP) versus jambe en C. Prosthet Orthot Int 2006 ; 30: 73–80.
-
Chin T, Sawamura S, Shiba R, et al.
Effet d’une prothèse intelligente (PI) sur la capacité de marche des jeunes amputés transfémoraux : comparaison des utilisateurs de PI avec des personnes valides. Am J Phys Med Rehabil 2003 ; 82: 447–451.
-
Abdulhasan ZM, Scally AJ, Buckley JG.
Terminaison de la marche sur une surface déclinée chez les amputés transfémoraux : impact de l’utilisation d’un système de membre contrôlé par microprocesseur. Clin Biomech, Bristol, Avon, 2018 ; 57: 35–41.
-
Chen C, Hanson M, Chaturvedi R, et al.
Avantages économiques des genoux prothétiques contrôlés par microprocesseur : une étude de modélisation. J Neuroengineering Rehabil 2018 ; 15: 62.
-
Riveras M, Ravera E, Ewins D, Shaheen AF, Catalfamo-Formento P.
Dégagement minimal des orteils et probabilité de trébuchement chez les personnes ayant subi une amputation transtibiale unilatérale marchant sur des rampes avec des conceptions prothétiques différentes. Démarche et posture. 1er septembre 2020 ;81 :41-8.
-
Johnson L, De Asha AR, Munjal R, et al.
Dégagement des orteils lors de la marche chez les personnes ayant subi une amputation transtibiale unilatérale : effets de la cheville hydraulique passive. J Rehabil Res Dev 2014 ; 51: 429.
-
Bai X, Ewins D, Crocombe AD, et al.
Une évaluation biomécanique des dispositifs hydrauliques cheville-pied avec et sans contrôle par microprocesseur lors de la déambulation en pente chez les amputés trans-fémoraux. PLOS ONE 2018 ; N° 13 : E0205093.
-
Askew GN, McFarlane LA, Minetti AE, et al.
Coût énergétique de la déambulation chez les amputés transtibiaux à l’aide d’un pied à réponse dynamique avec une « cheville » hydraulique ou rigide : aperçu de la dynamique du centre de masse du corps. J NeuroEngineering Rehabil 2019 ; 16: 39.
-
De Asha AR, Barnett CT, Struchkov V, et al.
Quelle prothèse de pied prescrire ?: Les différences biomécaniques constatées lors d’une comparaison en une seule séance de différents types de pieds se vérifient 1 an plus tard. JPO J Prosthet Orthèse 2017 ; 29: 39–43.
-
De Asha AR, Munjal R, Kulkarni J, et al.
Impact sur la biomécanique de la marche aérienne de l’utilisation d’un dispositif hydraulique cheville-pied 'Echelon' chez les amputés trans-tibiaux et trans-fémoraux unilatéraux. Clin Biomech, 2014 ; 29: 728–734.
-
De Asha AR, Munjal R, Kulkarni J, et al.
Altérations cinétiques articulaires liées à la vitesse de marche chez les amputés trans-tibiaux : impact de l’amortissement hydraulique de la cheville. J Neuroengineering Rehabil 2013 ; 10: 1.
-
De Asha AR, Johnson L, Munjal R, et al.
Atténuation des fluctuations de trajectoire du centre de pression sous le pied prothétique lors de l’utilisation d’une fixation hydraulique articulée de la cheville par rapport à une fixation fixe. Clin Biomech, 2013 ; 28: 218–224.
-
Bai X, Ewins D, Crocombe AD, et al.
Évaluation cinématique et biomimétique d’une cheville/pied hydraulique en terrain plat et en cambrure. PLOS ONE 2017 ; N° 12 : E0180836.
-
Alexander N, Strutzenberger G, Kroell J, et al.
Moments articulaires lors de la marche en descente et en montée d’une personne amputée transfémorale avec une cheville articulée hydraulique et une cheville prothétique rigide - une étude de cas. JPO J Orthèse Prosthet 2018 ; 30: 46–54.
-
Struchkov V, Buckley JG.
Biomécanique de la descente de rampe chez les amputés transtibiaux unilatéraux : Comparaison d’un pied contrôlé par microprocesseur avec des mécanismes cheville-pied conventionnels. Clin Biomech, 2016 ; 32: 164–170.
-
Portnoy S, Kristal A, Gefen A, et al.
Évaluation dynamique en extérieur des contraintes internes du moignon : pied prothétique à emmagasinement d’énergie hydraulique par rapport aux pieds prothétiques conventionnels à emmagasinement d’énergie. Posture de la marche 2012 ; 35: 121–125.
-
McGrath M, Davies KC, Laszczak P, et al.
L’influence des chevilles hydrauliques et du contrôle par microprocesseur sur la biomécanique des amputés trans-tibiaux lors d’une station debout tranquille sur une pente de 5°. Can Prosthet Orthèse J ; 2.
-
Moore R.
Effet d’un pied prothétique avec une unité hydraulique de la cheville sur les pressions plantaires maximales du pied controlatéral chez les personnes ayant subi une amputation unilatérale. JPO J Orthèse Prosthet 2018 ; 30: 165–70.
-
Moore R.
Effet sur l’asymétrie de synchronisation de la phase d’appui chez les personnes amputées à l’aide d’unités hydrauliques de cheville. JPO J Prosthet Orthèse 2016 ; 28: 44–48.
-
Sedki I, Moore R.
Évaluation du pied Echelon par le patient à l’aide du questionnaire d’évaluation des prothèses de Seattle. Prosthet Orthot Int 2013 ; 37: 250–254.
-
McGrath M, Laszczak P, Zahedi S, et al.
L’influence d’une cheville hydraulique contrôlée par microprocesseur sur la symétrie cinétique des amputés trans-tibiaux lors de la marche sur rampe : une série de cas. J Rehabil Assist Technol Eng 2018 ; 5: 2055668318790650.
-
Linx Documentation
-
Informations sur le produit
-
Linx Brochure
-
-
Autres téléchargements
-
Linx - Ankle Alignment Wedge Instructions for Use
-
Linx - Cosmetic Cover Instructions for Use
-
Linx - Pylon Kit [Long]
-
Linx - Sandal Toe Foot Range Information
-
Linx - Linx Profile Form US Iss3
-
Linx PDAC Verification Letter
Suggested L-Codes: L5828, L5845, L5848, L5856, L5973 -
Blatchford Product L Codes January 2024
-

Vous voulez rester au courant de nos actualités ?
Vous voulez rester au courant de nos actualités ? Nous serions ravis de vous tenir au courant des dernières nouvelles, de vous informer lorsque nous lançons de nouveaux produits et services et de partager certaines des histoires étonnantes de personnes utilisant nos produits qui changent la vie.
Je m´inscris